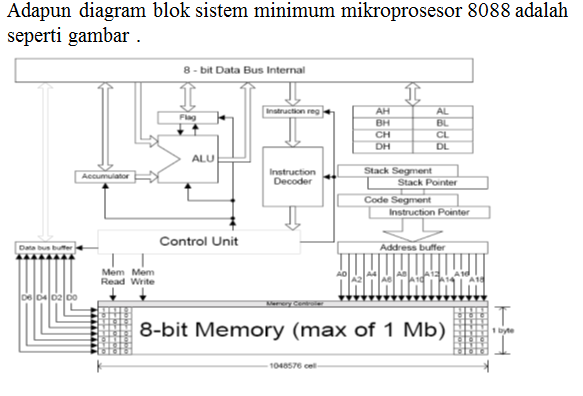
MIKROPROSESOR 8088
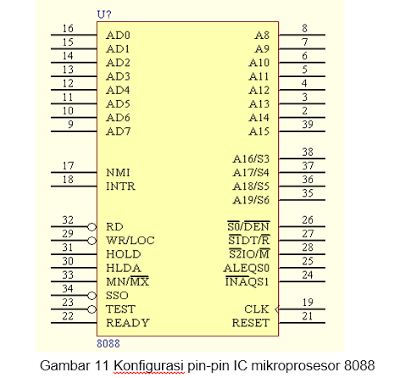
Adapun konfigurasi pin-pin IC mikroprosesor 8088 adalah seperti
gambar 11.
Fungsi masing-masing pin dari mikroposessor 8088 adalah:
1. AD0 – AD7 adalah Bus address - data
Jalur yang dimultipleks untuk menyalurkan data pada saat ALE aktif (1) atau byte rendah address pada saat ALE tidak aktif (0)
2. A8 – A15 adalah Bus address
Bit – bit dimana A8 – A15 ada selama siklus bus
3. A19/S6, A18/S5, A17/S4, A16/S3 adalah Address / Status
Kaki – kaki yang multiplek yang digunakan untuk bus address bit A16 – A19 pada saat ALE berlevel logika 1 dan untuk sisa silkus bus lainnya digunakan bit – bit status S3 – S6. Bit status S6 selalu berlogika 0, bit S5 menandakan kondisi dari bit flag I dan bit S3 san S4 yang mendakan segmen yang diakses selama siklus bus yang sedang berlangsung.
Gambar 11 Konfigurasi pin-pin IC mikroprosesor 8088
4. RD adalah Read
Sinyal kontrol yang akan berlevel logika 0 pada saat data bus siap menerima data dari memori atau I/O yang diteruskan ke mikroprosesor.
5. WR adalah Read
Sinyal kontrol yang akan berlevel logika 0 pada saat data bus siap menerima data dari mikroprosesor yang diteruskan ke memori atau I/O
6. READY adalah Ready
Input ini diperiksa oleh 8088 pada akhir dari siklus T2. Jika dalam kondisi logika 0, maka siklus pembacaan atau penulisan data akan diperpanjang sampai input ini kembali ke logika 1.
7. INTR adalah Interrup Request
Satu dari dua kali yang digunakan untuk menerima interupt hard-ware. Jika INTR diberi logika 1 pada saat flag 1 set, 8088 masuk ke siklus interupt acknowledge (INTA aktif) setelah intruksi yang sedang berlangsung selesai.
8. TEST adalah Test
Diperiksa oleh intruksi WAIT. Jika TEST berlogika 0, maka instruksi WAIT akan meneruskan ke instruksi selanjutnya, jika TEST ‘1’, WAIT akan menunggu sampai TEST ‘0’.
9. NMI adalah Nonmaskable Interrupt
Input yang mengaktifkan interrupt tipe 2 pada akhir dari instruksi yang sedang dilaksanakan.
10. RESET adalah Reset
Kaki yang jika diberi level logika 1 untuk minimum 4 clock, akan mereset 8088. Pada saat 8088 reset, 8088 mulai melaksanakan instruksi pada address memori FFFF0H. Dan menon-aktifkan interupsi dengan mereset flag 1.
11. CLK adalah Clok
Sebuah input yang menyediakan pewaktu dasar untuk 8088. Clok ini terus ber-duty-cycle 33 persen untuk memberikan pewaktu yang benar ke 8088.
12. VCC adalah Vcc
Input tegangan pencatu +5V
13. GND adalah Ground
Hubungan ke ground
14. MN/-MX adalah Mode Minimum / Maksimun
Pin yang digunakan untuk memilih mode operasi minimum jika dihubungkan ke +5V dan mode maksimum jika dihubungkan ke ground.
15. IO/-M adalah Input/Output atau Memori
Pin yang menunjukkan isi dari bus address adalah informasi pengaddress memori atau I/O
16. INTA adalah Interrupt Acknowledge
Respon untuk INTR. Selama permintaan interupsi, pin INTA akan berlogika 0 untuk menunjukkan bahwa bus 8088 menunggu vector-number.
17. ALE adalah Addres Latch Enable
Pin yang digunakan untuk menunjukkan bahwa bus address berisi address memori atau alamat port I/O
18. DT/-R adalah Transmite/ - Receive
Pin yang digunakan untuk mengendalikan arah aliran data melewati buffer data.
19. –DEN adalah Data Bus Enable
Pin yang aktif bila bus data telah berisi data.
Mikroprosesor 8088 diset pada mode minimum dengan memberi logika HIGH pada pin 33 dan logika LOW jika difungsikan dalam mode maksimum. Untuk pengaddressan memori, mikroprosesor 8088 menyediakan 20 bit address yang 8 diantaranya dimultipleks dengan data yaitu AD0-AD7. Sedangkan A16-A19 dimultipleks dengan sinyal kontrol S3-S6.
Untuk pengaddressan I/O port dan memori, 8088 menggunakan pin 28, jika pin 28 dalam kondisi HIGH maka address yang dikirim adalah address untuk I/O port dan jika dalam kondisi LOW maka address yang difungsikan adalah address dari memori. Selain itu 8088 juga dapat mengirimkan sinyal RD dan WR (keduanya aktif low) yang bertujuan untuk membaca dan menulis di memori atau I/O Port.
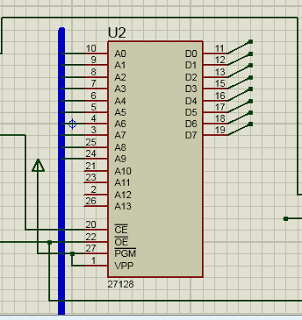
Misalkan sistem minimum menggunakan dua buah macam memori yaitu EPROM 27128 berkapasitas 16 K Bytes dan RAM statis 6116 yang berkapasitas 2 K Bytes. Setelah tombol RESET ditekan maka mikroprosesor akan menunjuk pertama kali pada address FFFF0h sehingga address tersebut harus sudah ada instruksi lompat ke awal program. Oleh karena itu EPROM diletakkan pada bagian terakhir memori sedangkan RAM diletakkan pada bagian awal memori karena untuk penggunaan interrupt, 8088 memakai address 00000h-003FFh sebagai tabel vector interrupt.
Mikroprosessor 8088 memiliki empat kelompok register 16-bit, yaitu :
Ø Data Register
Ø Pointer dan Index Register
Ø Flag Register dan Instruction Pointer
Ø Segment Register